MinigameCore Framework
One of the primary goals for Super Bionic Bash is to support an ever-expanding catalog of minigames.
To avoid reinventing the wheel with each new addition, I developed MinigameCore, a custom UE5 plugin that provides
a robust, extensible foundation for minigame development. It includes a suite of tools and systems designed to streamline creation, reduce repetitive work,
and provide a modular, scalable structure. With this plugin, new minigames can be rapidly prototyped and integrated without having to build common functionality from scratch.
This plugin, along with all of its dependencies and documentation, can be found here.
MinigameCore is made almost entirely in C++ for speed, efficiency, and access to deeper engine functionality.
However, the entire framework is fully Blueprint-friendly,
making it accessible and intuitive for both programmers and designers to work with.
Minigames can be made entirely within Blueprints by leveraging the provided features in MinigameCore.
MinigameCore still allows for full or partial C++ usage in minigames for flexibility.
One of the main strengths of MinigameCore is its modular design. As a plugin, it can be dropped into new, standalone
Unreal projects with minimal setup. This gives minigame creators the freedom to prototype in lightweight and isolated environments,
without the overhead of the full Super Bionic Bash project. Once ready, MinigameCore-powered minigames can be easily migrated back into the main game
simply by exporting the level and its dependencies.
MinigameCore provides many out-of-the-box systems essential for every Super Bionic Bash minigame, including:
- Practice Mode: Lets players rehearse with looping gameplay and instructional overlay. Ends when all players ready up.
- Player Spawning & Team Management: Built-in support for spawning players in different gamemodes (Free-for-All, 2v2, or 3v1) with automatic team assignment.
- Scorekeeping: Provides a modular point tracking system that calculates standings at the end of the round. Can be extended for custom scoring logic.
- Minigame UI Widgets: Handles spawning and lifecycle management of UI widgets, so designers only need to on the UI. No boilerplate setup required.
- Camera & Splitscreen Support: Supports flexible camera setups for both split-per-player and split-per-team views. Each screen segment gets its own minigame UI copy.
- Cutscenes: Adds a flexible workflow to have pre- and post-game cutscenes
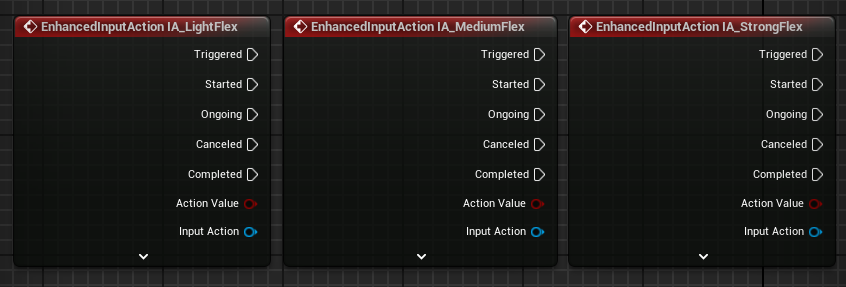
- Abstracted Custom Input: Exposes flex and motion sensor data as Blueprint-friendly input mappings using Unreal’s Enhanced Input system and custom actor components.
- Board Integration: Handles automatic reporting of minigame results to the main board game. Transitions back to the board are fully automated.
MinigameCore also includes full technical documentation that covers all available features, usage examples, and intended development workflows.
This ensures that both programmers and designers can quickly make the most of the system.
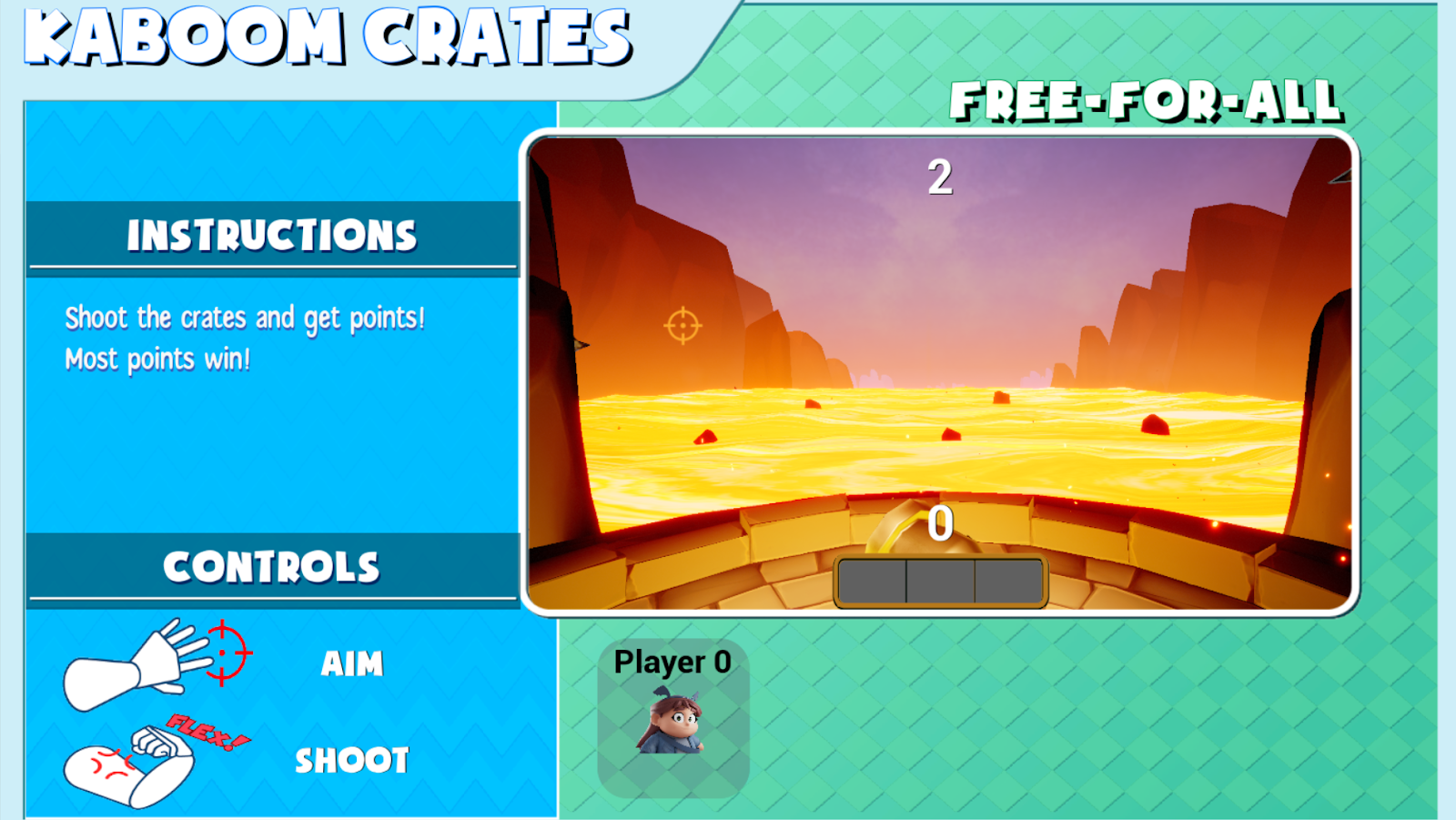
One example of a minigame built using MinigameCore is a cannon shooting game. Players use motion controls to aim their cannon and flex to fire.
Harder flexes shoot the cannon's projectile further which can overshoot or undershoot the targets, combining precise flexing with careful aim.
International Game Jam
As part of my work with Super Bionic Bash, I had the opportunity to help organize and participate in an international game jam in collaboration with
the University of Skövde in Sweden. The jam brought together 20 students from the university, forming four development teams.
This event was funded by a grant from the U.S. Department of State, highlighting its international and educational significance.

As this jam was primarily intended to generate new minigames for Super Bionic Bash, the Minigame Core system was essential to the event's
success. I developed played a central role in the event's success. I designed MinigameCore with accessibility in mind and worked closely with novice developers
before the jam to ensure the system was intuitive and easy to adopt, even for those with limited Unreal Engine experience.
During the jam, I provided MinigameCore tech support, assisted teams with general Unreal issues, and gathered feedback on my system. The event not only
produced minigames to be used in Bash but also revealed valuable insights for future improvements on MinigameCore, allowing future development to be faster, easier,
and more creative. It also validated some design choices I made with MinigameCore, such as prioritizing Blueprint support with the expectation that minigame creators will
not have working C++ knowledge.
EMG/Bluetooth
As part of the work with the games, I helped develop the Bluetooth backend for a custom controller that uses electromyography (EMG) to detect
the player's muscle flexion. The controller broadcasts these signals via Bluetooth to the game, where my system manages multiple connections, handles reconnections,
translates raw flex values into usable in-game input, and automatically assigns controllers to players. The backend is also designed to support platform-specific
Bluetooth APIs, allowing flexible deployment and seamless integration across different devices.

I also designed and implemented several algorithms to improve the usability of EMG input for gameplay.
The first handles calibration, ensuring the player is able to reach the full range of values from the EMG controller.
The second processes real-time EMG signals to detect flex patterns and categorize them into discrete intensity levels (i.e. light, medium, hard flex).
This allows minigames to react to threshold-based inputs rather than noisy raw values. This also mirrors the behavior of the EMG-powered prosthetic arms, which also uses
a threshold-based approach.
I also developed editor tools to support testing, debugging, and integration of the EMG controllers within Unreal Engine.
One example is a flex value graph, which plots recent EMG signal data over time.
This tool helps developers observe trends, identify issues, and evaluate calibration quality in real time.
Motion Tracking
Along with an EMG sensor, the custom game controllers used at Limbitless Solutions also include an inertial measurement unit (IMU),
combining a gyroscope and accelerometer. Since implementing it in this project, I have also implemented it as a core mechanic
in several other projects at Limbitless Solutions.
At the time I first started working on motion tracking, no prior game at the organization had used the hardware despite it being a part of the controller,
meaning there was no prior implementation or documentation to reference. I was tasked with building this system from the ground up.
With no prior experience working with motion sensors, it seemed daunting to translate raw signal data into usable motion data. The core challenge
of motion tracking was computing device rotation from gyroscope and accelerometer signals.
Early Attempts
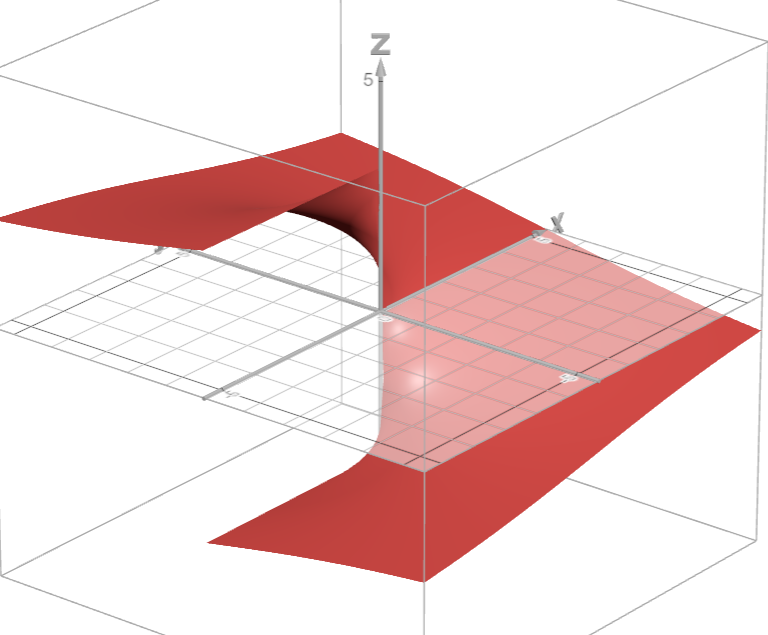
Drawing from my background in mathematics, I initially tried to take a trigonometric approach to determining orientation. Since an accelerometer should
measure 1G at rest, I attempted to calculate the angle of the device's tilt by applying atan2 to axes pairs. This method worked fairly well when the device
was still, or when it was moving within the same "octant" of rotation. However, the approach broke down near the axes due to singularities and instabilities in
the angle calculations. The arctangent graph below highlights the issue, showing a massive gap in the function along the negative X-axis.
Research - Quaternions and Physics
To overcome the limitations of basic trigonometry, I researched more advanced methods of representing orientation. I soon encountered quaternions, a concept
I had heard of in the past but found intimidating. After deep study, I developed a strong understanding and intuition for quaternions as tools for representing
3D rotation. Quaternions avoid common pitfalls with other rotation representations, like the aforementioned singularities or gimbal lock. I mastered key quaternion
concepts like how they encode angle-axis rotations, multiplication, conjugation, and the significance of rotation composition order.
Using this foundation, I was able to derive and implement mathematical formulas which proved critical to the motion tracking system.

I also furthered my understanding of the physics of IMUs. For instance, accelerometers measure proper acceleration.
When at rest relative to Earth, an accelerometer will detect the normal force pushing upward to keep it stationary. This finding was surprising to me at first,
but checked out with my observations.
I also explored gyroscope behavior and its tendency to drift over time. To address this, I also studied sensor fusion
techniques, which combine accelerometer and gyroscope data to improve accuracy over long periods of time.
Implementation
With my foundation set, I started developing the full data pipeline to enable motion controls. This began by processing raw IMU data, first by scaling it
into proper physical units and then by casting it from a stream of bytes into vectors. I then transformed the vectors from the IMU's coordinate system into
Unreal Engine 5's coordinate system, which had opposite handedness.
Using integration, I leveraged gyroscope data to estimate angular displacement over the short intervals between packets being sent. As mentioned before,
gyroscope data used this way often drifts over long periods of time, causing the orientation to diverge from reality. Accelerometer data can help by
providing a reference for the direction of gravity, but it too becomes unreliable during rapid movement or external accelerations.
To solve this, I combined gyroscope and accelerometer inputs, prioritizing gyroscope data during fast motions and relying on accelerometer data to correct
long-term drift. This results in stable and accurate orientation tracking.
With an established orientation, I rotate the accelerometer vector to isolate and subtract the gravity component, which estimates coordinate acceleration.
This acceleration is more intuitive as it is caused by forces other than gravity, such as the player.
This filtered data is far more useful for gameplay logic than raw proper acceleration.
Limitations
In evaluating the effectiveness of the system, I identified a key limitation. There is a slow but inevitable drift in orientation around the vertical axis.
This is because relying solely on an accelerometer's gravity measurement cannot determine the device's bearing, or where it's facing. Accurately measuring
bearing requires additional sensors that the controller does not have, such as a magnetometer or compass.
Other commercially successful motion-controlled games that do not have compass hardware, such as those on the Nintendo Switch, address this issue
by periodically resetting the device's bearing during gameplay. This is often done very subtly, maintaining a smooth player experience. As such,
clever game design can overcome this technical limitation.
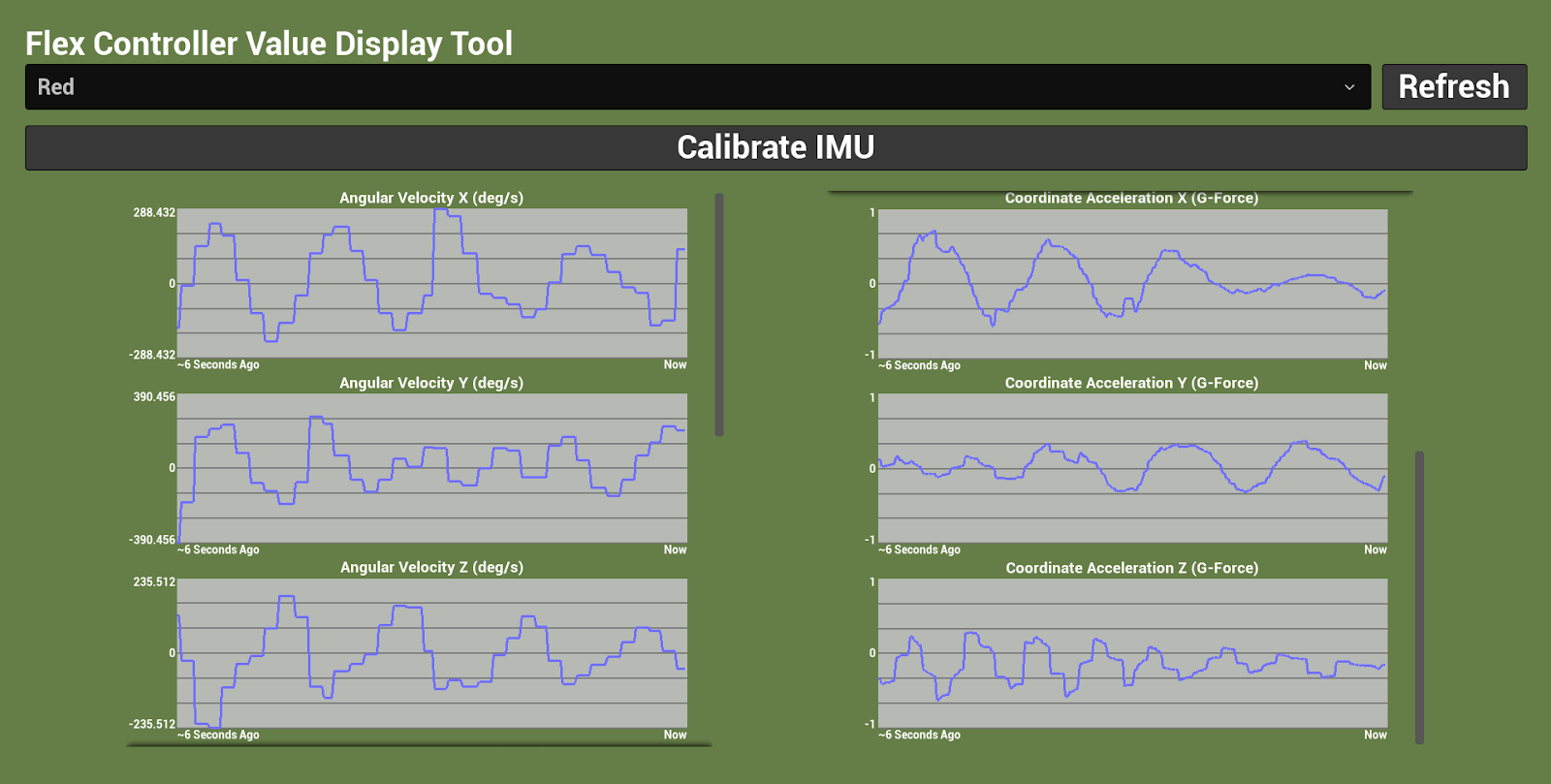
Editor Tools
Similar to the flex value graph, I developed similar graphing tools to visualize all motion sensor data streams over time.
These graphs proved essential for efficiently testing, debugging, and fine-tuning the motion sensor systems.
Board Systems
I have created several core systems to be used on the board game part of Super Bionic Bash. To support the workflow of designers and artists making these boards in Blueprints,
these systems were designed for reusability, extensibility, and easy workflows in mind. These systems were made with C++ and Blueprints.
- Dialog: Reusable system that displays dialog on the screen and allows player to make decisions.
- Shop: A generic turn interrupt that allows the player to purchase from a set of items.
- Items: Allows players to use items during their turn. Items can do just about anything. Designed to allow freedom with items without having to worry about overall game flow.
- Mobius: A rare collectible that determines the winner at the end of the game (think stars in Mario Party). Cycles between pre-defined "mobius tiles" for each board.
- AI: Created a framework to allow AI players in the board. AI players are identical to human players to most game systems, except an AI controller makes all turn decisions.
Character Customizer
I built a character customizer system using Epic's Mutable plugin. This project allows players to customize their character in many different ways. This character is then
used on the board and in minigames. There is also added support for certain minigames to override character customizations to fit the minigame theme (e.g. putting pirate hats
on characters in a pirate-themed minigame).
The biggest challenge to the character customizer has been making it as artist friendly as possible, since the bulk of the character customizer maintenance comes from adding
new customization options. To support this, I have created extensive internal documentation that highlights asset requirements and details the workflows for adding new assets to the customizer.
Team Collaboration
One of my favorite parts about working on Super Bionic Bash has been the opportunity to collaborate with such a talented team of all different skills and disciplines.
As the most senior member of the project's programming team and the main architect of the project's structure, I train and assist newer programmers
in learning Unreal Engine, C++, and the minigame creation system.
I also work closely with other senior programmers to co-design core systems, like the Bluetooth backend, through problem-solving, collaborative debugging, and architectural planning.
I also regularly support artists and designers by helping them navigate technical aspects of Unreal, ensuring their work is smoothly integrated into the game.
Beyond day-to-day collaboration, I also regularly attended team meetings and frequently presented my work to other teams within Limbitless Solutions.

